
Autonomous RC Car (ONGOING)
The goal of this project was to build a microcontroller based toy car. The car was fitted with infrared emitters to detect color change from white to black. There is also an iot board implemented so the user can command the car to do predefined tasks like a wide turn vs a short turn, going straight then stopping, etc.
First, we have the main components:

I soldered the power connections along with the LCD & thumb wheel onto this board.

This is the microcrontroller I bought from the TI website.
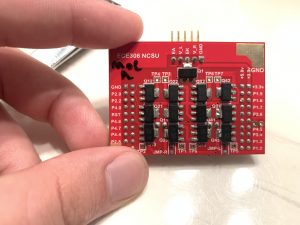
I soldered all these FETs onto the board and the power connector on the backside.
After assembly, I was tasked with programming the microcontroller using IAR in the C language. First part was setting up the ports. WILL POST CODE AFTER SEMESTER!!!
Following the ports being set up correctly, the peripherals worked and then I had to set them up to run various tasks from completing shapes WILL POST CODE AFTER SEMESTER!!! all the way to using an IR emitter and IR sensors to detect black lines.
Black line detection
After detecting a line, we were tasked with detecting then following the line.
Line Tracking and Following